VLSI PDA - Partitioning
參考清大王廷基老師課程講義
Partitioning
把整個設計拆分成較小的電路或系統,每個部分可以獨立設計,最後再合併在一起。Decomposition 必須最小化這蠍子系統間的 Interconnection。其他還要考慮的點有
Constraints
確保每個部分都符合劃定的條件,像是你每個子系統都要用一個 FPGA 來實現,就要確保子系統的元件數量、I/O Pin 的數量不超過 FPGA 的限制Communication
子系統之間的連線訊號不要出現在 Critical Path 上,晶片內的 Timing 跟 PCB 的 Timing 不一樣
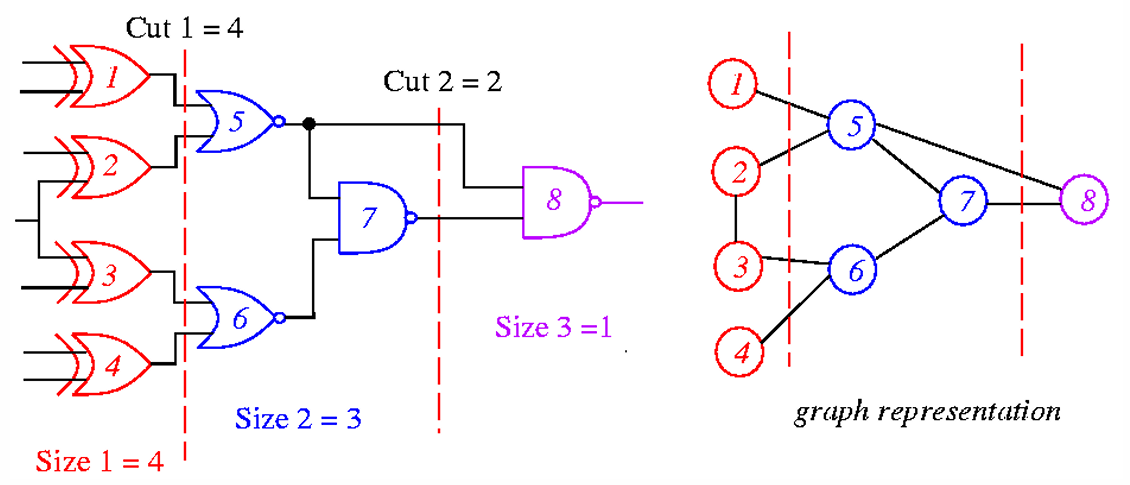
- Cutset: 一個 Cut 包含很多被切掉的 Net,Cutset 就是這些 Net 的集合
- Cut size: Cutset 的大小
- 有些 Edge 可以賦予 Weight (像是 Critical Path 上的 Edge)
Problem
給定 Graph $G = (V, E)$,每個 Vertex $v \in V$ 有 Size $s(v)$,每個 Edge $e \in E$ 有 Weight $w(e)$,要把 set $V$ 分成 $k$ 個 Partition,使得每個 Partition 的 Size 在某限制範圍內,並且最小化 Cutset 的 Weight。
就算是在 $k = 2$、每個頂點 size 都一樣、每條邊的 weight 也一樣的情況下,在有 Size Constraint 的情況下,這個問題還是 NP-Hard
若沒有 Size Constraint,這個問題就是 Maximum Flow Minimum Cut 問題,可以在 Polynomial Time 解決
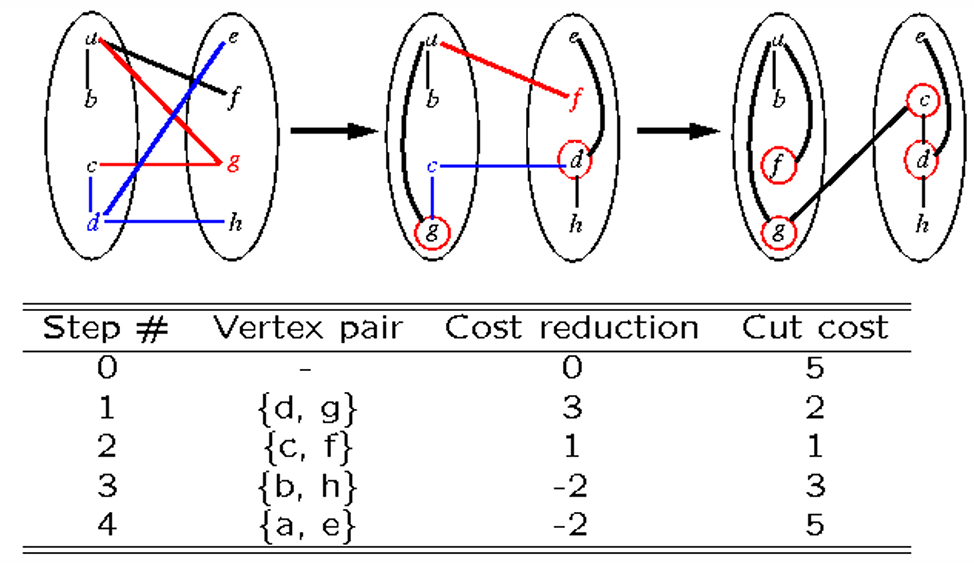
Kernighan-Lin (KL) Algorithm
KL Algorithm 是一種 Greedy 的 Heuristic Algorithm,不保證找到最佳解,但是通常結果不錯
針對 2-way Partitioning、每個頂點 Size 一樣、每條邊都是 2-terminal nets 的情況,且兩個集合的 Size 要一樣大 (又稱 Balanced Partitioning、Bi-sectioning)
- 隨機把所有頂點分成兩個集合 $A$、$B$
- Pass
- 選出 Gain 最大的 Pair $(u, v)$,$u \in A$、$v \in B$,並且交換 $u$、$v$ 的 Partition
- Lock $u$、$v$,之後交換不再考慮這兩個頂點
- 直到所有頂點都被 Lock
- 算出最大的 Partial Sum Gain $G$,這個 Gain 就是這次 Pass 的 Gain
- 假設前 $k$ 個 Pair 的 Gain 總和 $G_k$ 是最大的,就真的去交換前 $k$ 個 Pair
- 重複 Pass,直到 Partial Sum Gain $G \leq 0$
- Gain
$$
\text{Gain}(u, v) = \text{Old_Cutset}(A, B) - \text{New_Cutset}(A, B)
$$
在同個 Pass 中,第二次算 Gain 的時候,它的 $\text{Old_Cutset}(A, B)$ 是第一次算 Gain 的結果
可以發現交換頂點 $u$、$v$ 之後,$u \in A$、$v \in B$,原本 $u$ 和集合 $B$ 所有頂點的連線都不用算在 Cut ($u$、$v$ 連線除外),但原本 $u$ 和集合 $A$ 所有頂點的連線都要多算,同理於 $v$。因此在計算的時候只要考慮 External Cost 和 Internal Cost 就好
External Cost
$$
\text{External_Cost}(u) = \sum_{v \in B} w(u, v)
$$Internal Cost
$$
\text{Internal_Cost}(u) = \sum_{v \in A} w(u, v)
$$Cost Reduction for moving $u$ (D-value)
$$
\text{D-value}(u) = \text{External_Cost}(u) - \text{Internal_Cost}(u)
$$Cost Reduction for swapping $u$ and $v$ (Gain)
$$
\text{Gain}(u, v) = \text{D-value}(u) + \text{D-value}(v) - 2w(u, v)
$$
假設上述的 $u$、$v$ 是第一次交換,且 $x \in A - {u}$ 會在第二次被交換。第一次交換後必須更新 $x$ 的 D-value,因為 $x$ 的 Internal Cost 和 External Cost 都可能改變。
原本 $x$ 和 $u$ 的連線不用算在 Cut,但是 $x$ 和 $v$ 的連線要算在 Cut,交換後一來一回都各自差兩倍
$$
\text{D-value}^\prime(x) = \text{D-value}(x) + 2w(x, u) - 2w(x, v)
$$
Time Complexity
- 算出每個頂點的 D-value: $O(n^2)$
- 一次 Pass 中,要交換所有頂點,每次交換都要找到所有 Pair 中最大的 Gain: $O(n \cdot n^2) = O(n^3)$
- 若總共有 $r$ 次 Pass: $O(r \cdot n^3)$
要做幾次 Pass 跟 Initial Partition 有關,但不管要做幾次,最後這個演算法一定可以結束,$r$ 一定是 Finite Number
對於 K-way Partitioning 的問題,也可以用 KL Algorithm 來做
- 一開始 Partition 成 K 個 set,讓這些 set 彼此之間套用 KL Algorithm,直到所有 set 都不再改變
- 一開始 Partition 成 2 個 set,用 Recursive 的方式來做,直到 Partition 成 K 個 set,一樣兩兩套用 KL Algorithm
KL Algorithm 的缺點
假設所有頂點的 Size 都一樣
對於真實的 Logic Gate 來說,每個 Gate 的 Size (面積、大小) 都不一樣。
可以把這個頂點變成很多個單位頂點,形成一個
Clique,兩兩之間都有 Edge 相連,且讓他們的 Weight 超大,在做 KL 的時候可以保證這些頂點會在同一個 Partition。但是這樣整個 Graph 的 Size 會變很大,頂點數量和邊數都大幅增加
KL Algorithm 只能考慮集合的 Size 相同的情況
要處理 Unbalanced Partitioning 的問題的話可以加入一些 Dummy Vertices
KL Algorithm 不能處理 Hypergraph
Hypergraph 是一種 Graph 的延伸,一個 Edge 可以連接多個 Vertex。要處裡這種問題要先把 Hypergraph 轉換成一般的 Graph
複雜度高: $O(n^3)$
Fiduccia-Mattheyses (FM) Algorithm
FM Algorithm 一樣是 Greedy 的 Heuristic Algorithm,為 KL Algorithm 的改良版,可以把 Pass 的複雜度降到 Linear Time
與 KL Algorithm 不同的地方
一次只搬運一個 Vertex
可以想像一次只搬運一個 Vertex 的 Solutuon Space 會更大,更有機會找到更好的解
Vertex 可以有不同的 Size
可以處理不嚴格的 Unbalanced Partitioning
用 Bucket Sort 來選擇要移動的 Vertex
每次 Pass 的時間複雜度是 $O(P)$,$P$ 是 Pin 的數量
Notation
- $n(i)$: Net $i$ 連到 Cell 的數量,ex: $n(1) = 4$
- $s(i)$: Cell $i$ 的 Size
- $p(i)$: Cell $i$ 的 Pin 的數量,ex: $p(6) = 3$
- $C$: Cell 的總數,ex: $C = 6$
- $N$: Net 的總數,ex: $N = 6$
- $P$: Pin 的總數,ex: $P = p(1) + p(2) + \cdots + p(C)$

Cut
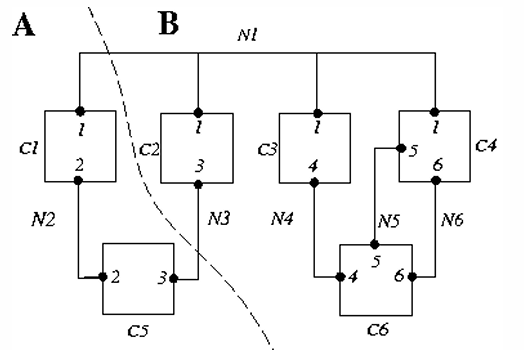
- Cutstate: 這個 Net 有沒有被切到
- Net 1 和 Net 3 的狀態是
Cut - Net 2、Net 4、Net 5 和 Net 6 的狀態是
Uncut
- Net 1 和 Net 3 的狀態是
- Cutset: 被切到的 Net 的集合
- Cutset = {Net 1, Net 3}
- $\lvert A \rvert$ = size of set $A$ = $s(1) + s(5)$
- $\lvert B \rvert$ = $s(2) + s(3) + s(4) + s(6)$
本質上是一個 Balanced Partitioning 的問題加上一點彈性。給定一個常數 $r$,把一個 Hypergraph Partition 成兩個集合 $A$、$B$ 後,要滿足
$$
\frac{\lvert A \rvert}{\lvert A \rvert + \lvert B \rvert} \approx r
$$
也就是 分在 A 那邊的面積 要佔整個面積的 $r$,且希望 Cutset 的 Size 越小越好
其中 $r$ 的意義是
$$
rW - S_{\text{max}} \leq \lvert A \rvert \leq rW + S_{\text{max}}
$$
其中
- $W$ 是整個 Hypergraph 的總面積,$W = \lvert A \rvert + \lvert B \rvert$
- $S_{\text{max}}$ 是最大的 Cell 的 Size
Input Data Structure
根據傳進來的 Netlist,可以建立 Cell Array 和 Net Array,分別需要 $O(P)$ (Pin 數量) 的時間複雜度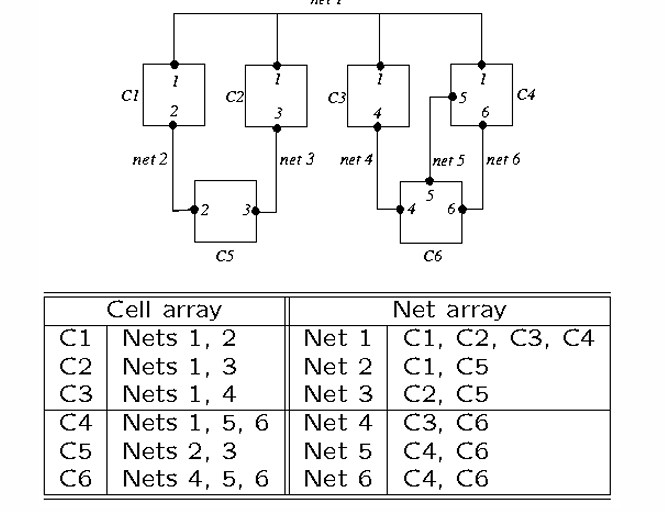
Balance & Movement
Initial Balance
先讓 A 為空集合,B 為所有 Cell 的集合,老師提供兩種方法:一種是把 B 按照 Size 做排序,一個一個 Cell 放進 A,直到滿足 $r$ 的條件;另一種是不排序,隨機挑選 Cell 放進 A,直到滿足 $r$ 的條件
Gain
$$
\text{Gain}(i) = \text{Cutset}(A, B) - \text{Cutset}(A - {i}, B \cup {i})
$$也就是把 Cell $i$ 從 A 搬到 B,Cutset 的 Size 會變小多少
Movement
每次只搬一個 Cell,兩邊之中選一個 Gain 最大的 Cell 搬過去,如果符合 $r$ 的條件就搬,不符合就不搬,並且 Lock 這個 Cell,之後不再考慮 (沒搬成功的不要 Lock)
最後跟 KL 一樣,直到所有 Cell 都被 Lock 之後,找出最大的 Partial Sum Gain,這個 Gain 就是這次 Pass 的 Gain,真的去搬那些 Cell
Cell Gains and Data Structure Manipulation
首先要知道的是,每個 Cell 移動的 Gain 值跟它的 Pin 數量有關
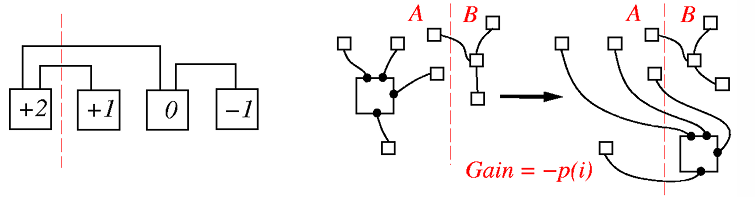
因此可以確定移動一個 Cell 的 Gain 絕對不會超出它本身 Pin 的數量
$$
-p(i) \leq \text{Gain}(i) \leq p(i)
$$
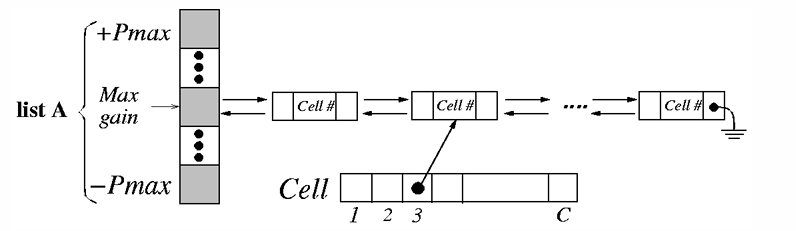
接著集合 A 和 B 個有一個 Size 為 $(2 \cdot P_\text{max} + 1)$ 的 Bucket List,每個 Entry 代表一個 Gain 的值,每個 Entry 裡面存放 Gain 值相同的 Cell 的編號,用 Doubly Linked List 儲存起來
$P_\text{max}$ 是所有 Cell 中 Pin 數量最多那個值
除此之外,還會有個 Cell Array,每個 Cell 有一個指標指向它在 Bucket List 中的位置,這樣可以在 $O(1)$ 的時間內找到目標 Cell
最後,Bucket 裡面還有一個 Max Gain 變數,用來記錄這個集合中最大的 Gain 值,就可以藉由這個變數去找目標 Entry 的第一個 Cell,也就是 Gain 最大的 Cell
Net Distribution and Critical Nets
Distribution of Net i 的定義
$(A(i), B(i)) = (2, 3)$ 代表 Net $i$ 有 2 個 Pin 在 A,3 個 Pin 在 B
計算所有 Net 的 Distribution 的時間複雜度是 $O(P)$
Critical Nets
如果移動任何一個 Cell 會改變這個 Net 的 Cutstate,這個 Net 就稱為 Critical Net。
可以想像只有 Cut->Uncut 或 Uncut->Cut 兩種情況,因此只會發生在 移動前後所有 Pin 都在同一邊 的情況下,也就是
$$
(A(i), B(i)) = (0, n(i)) \text{ or } (n(i), 0)
$$只有 Critical Nets 才會影響 Gain 的計算

Computing Cell Gains
一開始要對每個 Cell Iterate 一次所有連到它的 Net ,藉此計算它的 Gain,時間複雜度為 $O(P)$
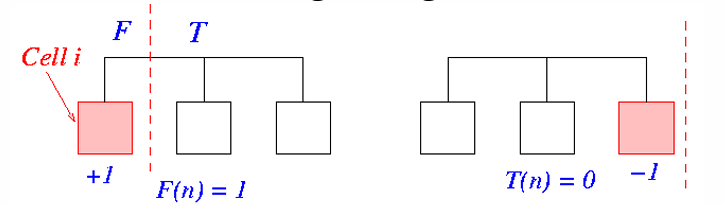
可以看到對於某 Net $n$,在 $F(n) = 1$ 時,移動這個 Cell $i$ 會讓 Net $n$ 從 Cut 變成 Uncut,因此這個 Net 對於這個 Cell 貢獻的 Gain 就是 1
另一種情況是當 $T(n) = 0$ 時,移動這個 Cell $i$ 會讓 Net $n$ 從 Uncut 變成 Cut,因此這個 Net 對於這個 Cell 貢獻的 Gain 就是 -1
Algorithm for Updating Cell Gains
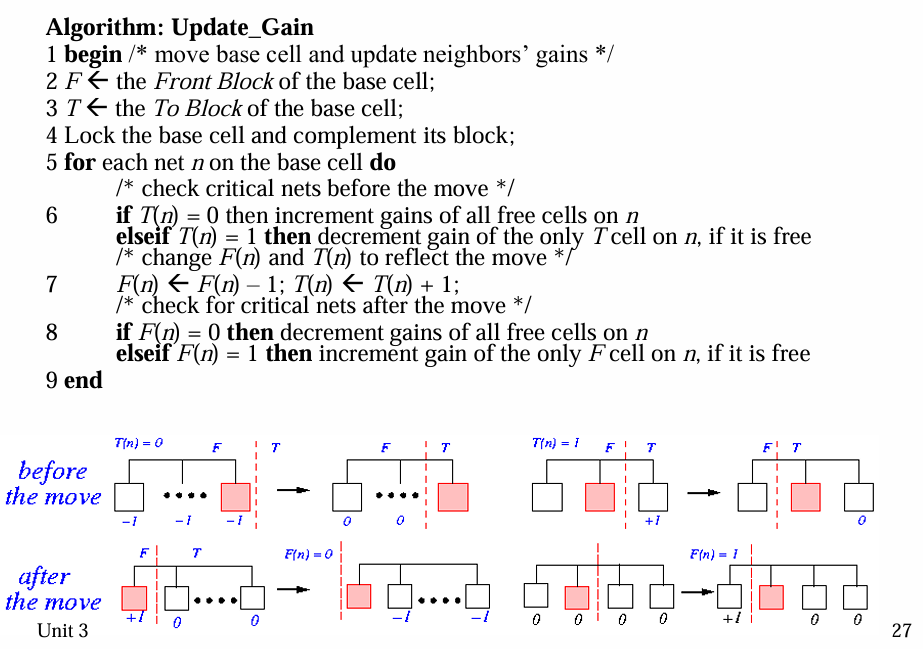
只要想成 目標是 Cut Size 越小越好,所以要找 Gain 最大的 Cell,我們越傾向於移過去某 Cell 後 Net 會變 Uncut 的情況,因此該 Net 對於該 Cell 的 Gain 就是 1,反之越不希望 Net 變 Cut,該 Net 對於該 Cell 的 Gain 就是 -1
每次 Update 的時間複雜度是 $O(P)$
Simulated Annealing (SA) Algorithm
感覺很像機器學習,目的是找到 Global Optimal Solution,但常常會卡在 Local Optimal Solution
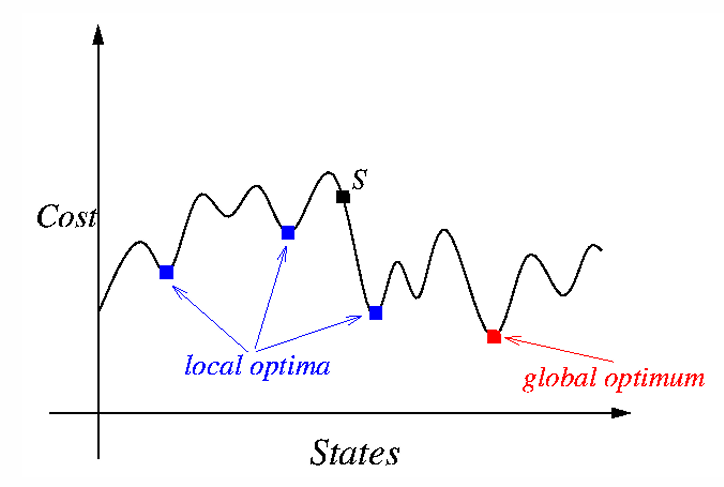
Basics
概念是讓 up-hill move 出現的機率不為 0,其機率會由 up-hill 的量和溫度 T 來決定
$$
\text{Prob}(S \rightarrow S^\prime) = \begin{cases}
1 & \text{if } \Delta C \leq 0 \
e^{-\Delta C / T} & \text{if } \Delta C > 0
\end{cases}
$$
- 其中
- $\Delta C$ 是 Cost 的變化量,$\text{Cost}(S^\prime) - \text{Cost}(S)$
- $T$ 是溫度,隨著時間遞減,讓
up-hill move的機率越來越小,因此 $T_i = r^i \cdot T_0$,$r$ 是一個介於 0 和 1 之間的常數
Generic SA Algorithm
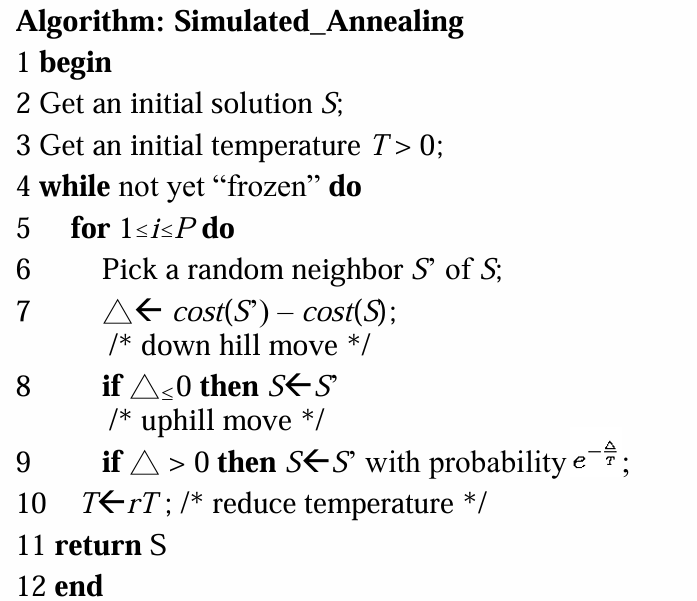
早期受限於記憶體大小,不會把曾經算過的最佳解存起來,這裡就是偏早期的作法
可以看到 SA 構成的四大要素為
- Solution Space: 所有可能的解
- Neighborhood Structure: 定義了如何從一個解移動到另一個解
- Cost Function: 用來評估一個解的好壞
- Annealing Schedule: 決定了溫度如何隨時間變化
Partitioning by SA
在 Partitioning 的問題中
- Solution Space: 所有可能的 Partition
- Neighborhood Structure: 一次只搬一個 Cell 到另一邊
- Cost Function: Cutset 的 Size + Balance 的 Cost
- Annealing Schedule: 溫度隨時間遞減
其中 Cost Function 的定義為
$$
f = C + \lambda B
$$
- $C$: Cutset 的 Size
- $B$: 評估現在 Balance 的程度,又定義成 $B = (|S1| - |S2|)^2$
- $\lambda$: 一個常數,用來決定 Balance 的重要程度
Annealing Schedule 的定義為
$$
T_i = r^i \cdot T_0
$$
- $r$ 通常定成 0.9
- 每當 每個 Cell 平均成功移動 10 次 或 嘗試移動次數超過 100 * 總 Cells 數量 的情況發生,就把溫度調成 $r$ 倍
- 如果 連續 3 種溫度都沒有移動成功 就結束,像是機器學習的 Early Stopping
Multi-Level Partitioning
可以分成三個步驟
Coarsening
把許多小 Cell 合併成大 Cell,也就是把 Graph 變成更小的 Graph,這樣可以減少計算量。通常會做很多次 CoarseningInitial Partitioning
在 Coarsest 的 Graph 上做 Partitioning (KL、FM、SA)Uncoarsening
把 Initial Partitioning 的結果做 Uncoarsening,把一些原本併在一起的 Cells 拆開,放大整個 Graph,可以想像原本在 A 集合的 Cells 做 Uncoarsening 後還是在 A 集合。做了 Uncoarseing 後,相當於得到一個更好的 Initial Solution,再做一次 Partitioning,收斂的速度會很快,結果也會比較好
也會做很多次 Uncoarsening,變回最原始的 Graph

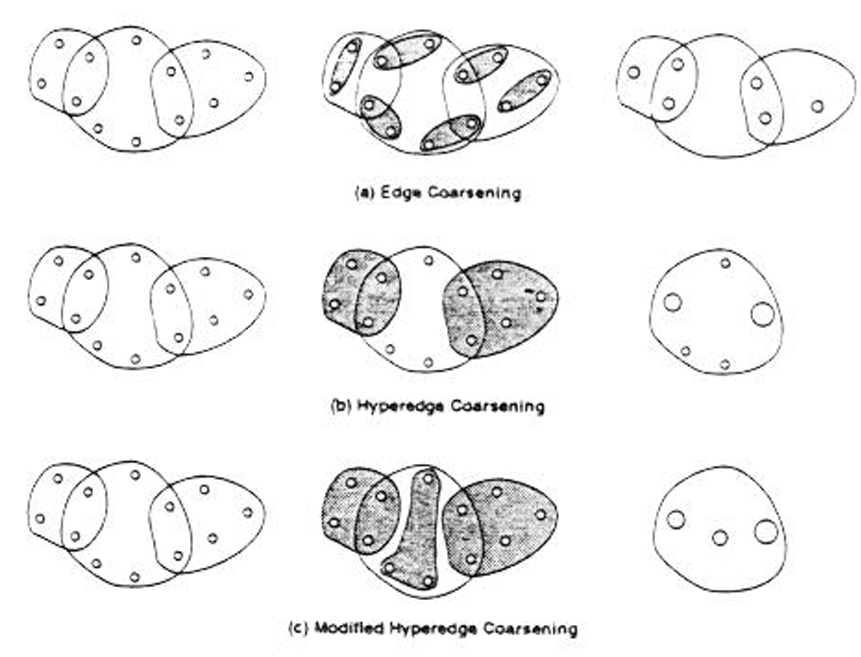
Coarsening Algorithm
- Edge coarsening
兩兩合併 - Hyperedge coarsening
會選一組 hyperedges set,把每個 hyperedge 連接到的 Vertices 都合併成一個 Cluster - Modified hyperedge coarsening
先做 Hyperedge coarsening 後,再把剩下落單的 Vertex 合併成一個 Cluster
Assignment
HW1
Setup
Synopsys Design Constraints (.sdc) file
是一種用來描述 Timing Constraints 的檔案,可以用來告訴 Synthesis Tool 或 Place & Route Tool 一些 Timing 的限制,例如:Clock Period、Setup Time、Hold Time、Clock Latency 等等Library Exchange Format (.lef) file
用在 PnR,描述 Standard Cell、Macro Cell 的 Physical Layout Information,包含 Standard Cell 的物理邊界、Macro 的位置與大小、金屬層的 Routing 規則、VDD/VSS 的連線資訊、Via 的位置等等
Import LEF 讓工具知道 Standard Cell 和 Macro 的物理尺寸,以及哪些 Metal Layer 可以用來做 Routing
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25UNITS
DATABASE MICRONS 1000 ; // 1 LEF unit = 1 nm
END UNITS
// Metal Layer
LAYER M1
TYPE ROUTING ;
DIRECTION HORIZONTAL ;
PITCH 0.14 ;
WIDTH 0.07 ;
END M1
// Standard Cell
MACRO INVX1
CLASS CORE ;
SIZE 0.5 BY 1.2 ;
PIN A
DIRECTION INPUT ;
USE SIGNAL ;
PORT
LAYER M1 ;
RECT (0.1 0.2) (0.2 0.3) ;
END
END A
END INVX1MMMC (Multi-Mode Multi-Constraint) file
為了確保晶片能夠在所有情境下正常運行,像是:高電壓、低電壓、高溫、低溫甚至 Process Variation 等等,這些變因會影響 Timing 和 Power,因此要可以用 MMMC 來描述這些情境,考慮所有的組合,讓晶片在所有情境下都能正常運作None-Negative Slack
Slack 是指某個 Timing Path 的 Delay 跟 Constraint 之間的差值,None-Negative Slack 代表這個 Path 是符合 Timing Constraint 的innovus setDesignMode -process 7 -node N7
設定 Design Mode 為 7nm 的製程,並且設定製成技術為 N7setDesignMode -bottomRoutingLayer 2
設定最底層的 Routing Layer 為 Metal 2,讓 PnR 工具知道 Global Routing 的從這一層開始
Pre-power planning and Floorplan
確保所有 Standard Cells、Macro、Clock Tree 與電源網絡 Power Network 都能正確擺放,為之後 PnR 做準備。Pre-Power Planning 設定 Global Net,確保所有元件都能正確連接到 VDD 和 VSS
Core Size by Aspect Ratio (H/W = 1.0)
指定 Floorplan 的 Core Size,這裡是正方形Core Utilization
指定 Core 的使用率,0.4代表 Standard Cell 的面積佔整個 Core 的 40%,剩下的 60% 留給 Routing,太高會影響 Routing 或 TimingCore to Die Boundary
Core 與 Die 的邊界之間的間距,通常會留一些空間給 I/O Pads、Power Pads、BumpsTool Command Language (.tcl) file
類似於 Shell Script,可以用來執行一連串的指令,例如:Synthesis、Place & Route、Simulation 等等Well Tap Cell
避免 Latch-up,連接 P-Well 到 GND (NMOS),N-Well 到 VDD (PMOS)1
addWellTap -cell TAPCELL_ASAP7_75t_L -cellInterval 12.960 -inRowOffset 1.296- 在 Core 區域內,每隔 12.960 µm 插入 Well Tap Cell,並偏移 1.296 µm 來對齊。
Power Planning
Power Ring
在 Core 周圍建立一個封閉的電源環,讓所有元件都能夠穩定的接上 VDD 和 VSS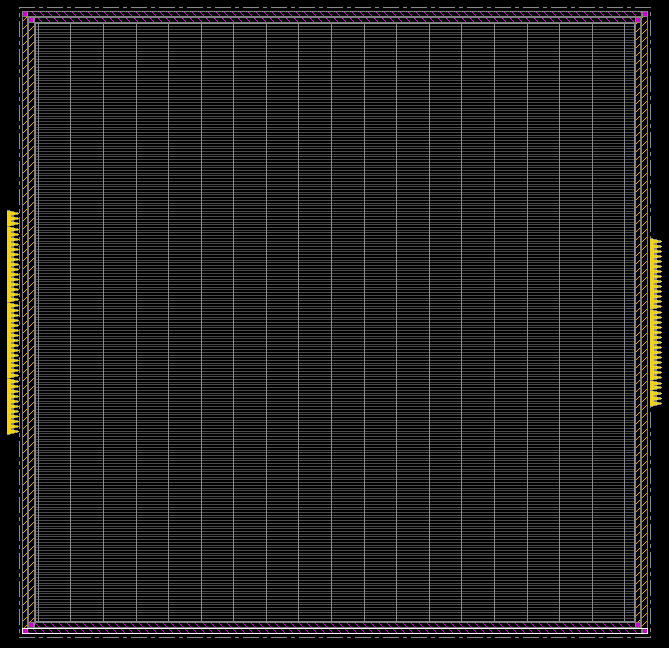
Power Stripes
在 Core 內部建立一個電源線,連到 Power Ring,形成完整的 Power Network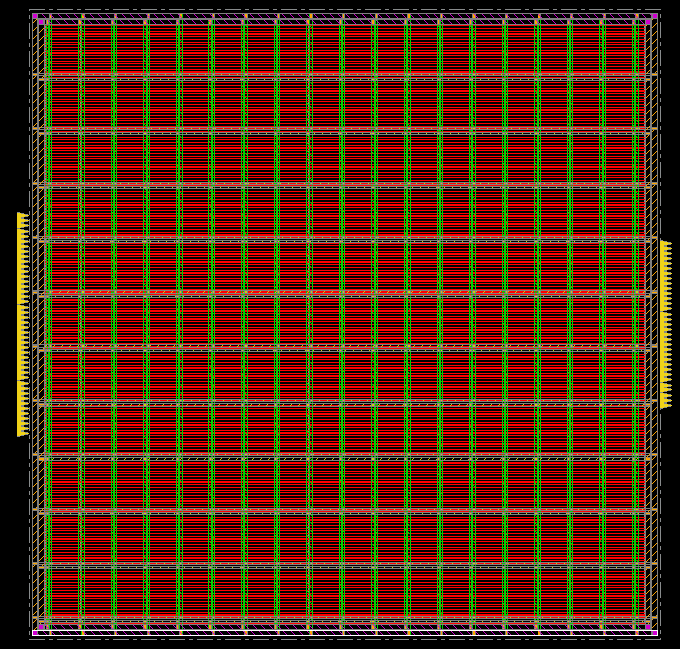
Placement (place_opt_design)
Placement
把所有 Standard Cells、Macro Cells 放到 Floorplan 的 Core 內Placement Optimization
透過 Placement Optimization 來最佳化 Placement,達到 Power Optimization 或 Timing Optimization
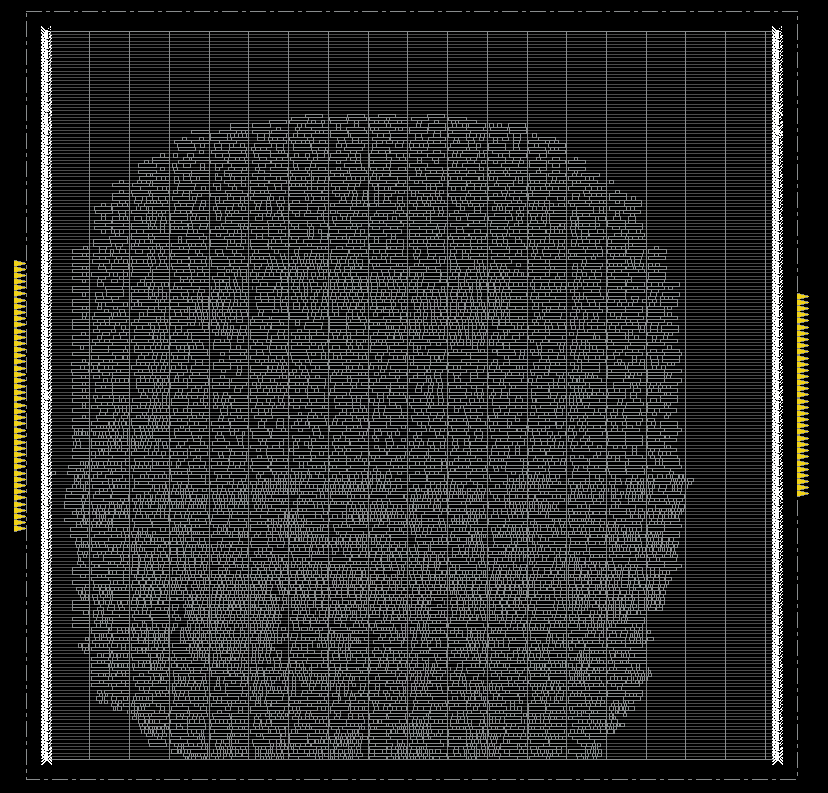
Clock Tree Synthesis
CLK 控制晶片裡所有 Flip-Flop 的 Timing,要確保所有 Flip-Flop 都能在同一個 Clock Cycle 內正確的被觸發
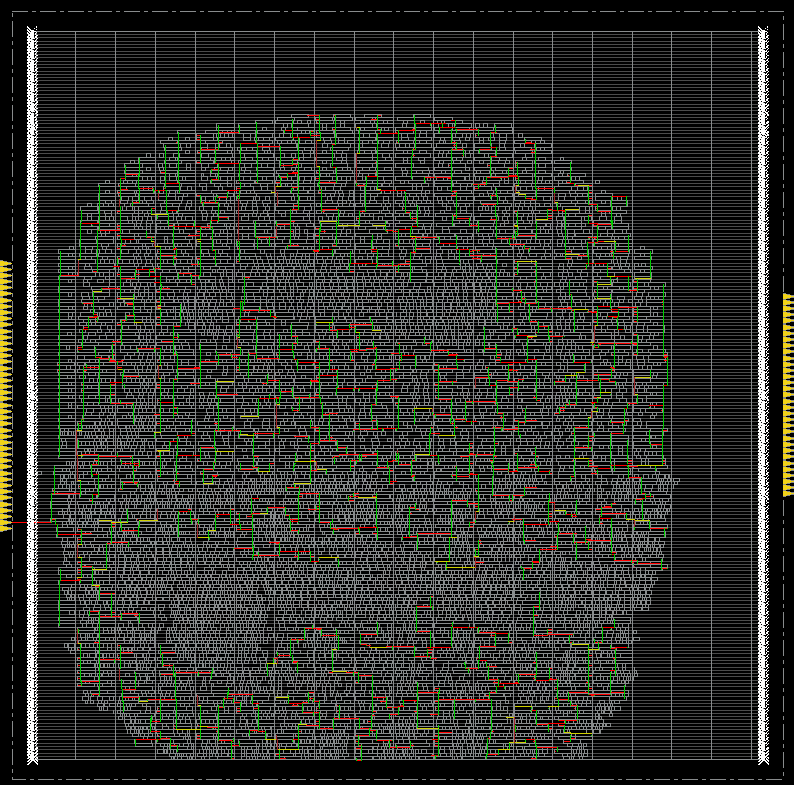
圖中的紅色、綠色、黃色線就是 CLK 訊號
Routing
routeDesign
將所有標準單元、Macro 之間的連線轉換為實際金屬導線,並確保符合 Timing 和 DRC 規則,自動插入 Via 連接不同金屬層