Machine Learning - Training Difficulties
惡補 ML https://www.youtube.com/watch?v=Ye018rCVvOo&list=PLJV_el3uVTsMhtt7_Y6sgTHGHp1Vb2P2J
類神經網路訓練不起來
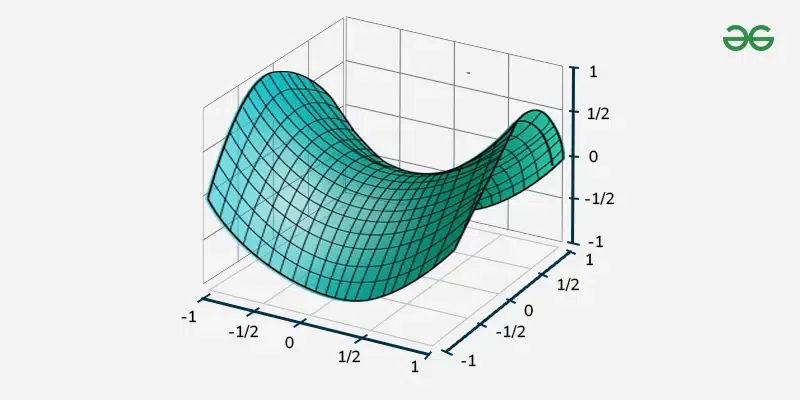
卡在 Critical Point
Local MinimumSaddle Point
泰勒展開式
對於 $L(\theta)$,在 $\theta = \theta^\prime$ 可以被近似為:
$$
L(\theta) \approx L(\theta^\prime) + (\theta - \theta^\prime)^T \cdot g + \frac{1}{2}(\theta - \theta^\prime)^T \cdot H \cdot (\theta - \theta^\prime)
$$
- $g$ 為 Gradient Vector,$g = \nabla L(\theta^\prime)$
- $H$ 為 Hessian Matrix,$H = \nabla^2 L(\theta^\prime)$
當走到 Critical Point 時,Gradient 會等於 0,所以可以得到:
$$
L(\theta) \approx L(\theta^\prime) + \frac{1}{2}(\theta - \theta^\prime)^T \cdot H \cdot (\theta - \theta^\prime)
$$
因此可以利用 Hessian Matrix 來判斷是 Local Minimum 、 Local Maximum 還是 Saddle Point
- 當 $\frac{1}{2}(\theta - \theta^\prime)^T \cdot H \cdot (\theta - \theta^\prime) > 0$ 時,可以知道任何在 $\theta^\prime$ 附近的 $\theta$,$L(\theta) > L(\theta^\prime)$ ,所以 $L(\theta^\prime)$ 是
Local Minimum - 當 $\frac{1}{2}(\theta - \theta^\prime)^T \cdot H \cdot (\theta - \theta^\prime) < 0$ 時,可以知道任何在 $\theta^\prime$ 附近的 $\theta$,$L(\theta) < L(\theta^\prime)$ ,所以 $L(\theta^\prime)$ 是
Local Maximum - 當 $\frac{1}{2}(\theta - \theta^\prime)^T \cdot H \cdot (\theta - \theta^\prime)$ 有時候大於 0 有時候小於 0 時, $\theta^\prime$ 是
Saddle Point
基於線性代數的知識,可以知道 Hessian Matrix 是 Symmetric Matrix,所以可以透過 Eigenvalue 來判斷是 Local Minimum 、 Local Maximum 還是 Saddle Point
- 當
Hessian Matrix的Eigenvalue全部大於 0 時,是Local Minimum - 當
Hessian Matrix的Eigenvalue全部小於 0 時,是Local Maximum - 當
Hessian Matrix的Eigenvalue有正有負時,是Saddle Point
如果是 Saddle Point,可以透過 Hessian Matrix 來判斷出 Loss 更小的方向,然後往那個方向走:
$$
L(\theta) \approx L(\theta^\prime) + \frac{1}{2}(\theta - \theta^\prime)^T \cdot H \cdot (\theta - \theta^\prime)
$$
假設 $u$ 是 Hessian Matrix 的 Eigen vector,$\lambda$ 是 Eigen value,可以得到:
$$
u^T \cdot H \cdot u = u^T \cdot (\lambda \cdot u) = \lambda \lVert u \rVert^2
$$
當 $(\theta - \theta^\prime) = u$ 且 $\lambda < 0$ 時:
$$
\frac{1}{2}(\theta - \theta^\prime)^T \cdot H \cdot (\theta - \theta^\prime) = \frac{1}{2}u^T \cdot H \cdot u = \frac{1}{2}\lambda \lVert u \rVert^2 < 0
$$
可以知道 $L(\theta) < L(\theta^\prime)$。因此如果讓 $\theta^\prime$ 往 $u$ 的方向走,$\theta^\prime + u = \theta$,可以得到更小 Loss 的 $\theta$。
這只是一種解法,在實作上計算量很大,沒有人會這樣做。
此外,實際上 Local minimum 並不常見,Loss 下不去常常是卡在 Saddle Point,但是用一般的 Gradient Descent 通常不會卡在 Critical Point。
為什麼要用 Batch
Batch size = N(Full Batch)
- 一次拿所有資料去算 Gradient
- 每一次的 Gradient 都很穩定
- 理論上花的時間比較多,但考慮到平行運算,若以 epoch 為單位,實際上可能更快
Batch size = 1
- 一次只拿一筆資料去算 Gradient
- 每一次的 Gradient 都很不穩定,可能會跳來跳去
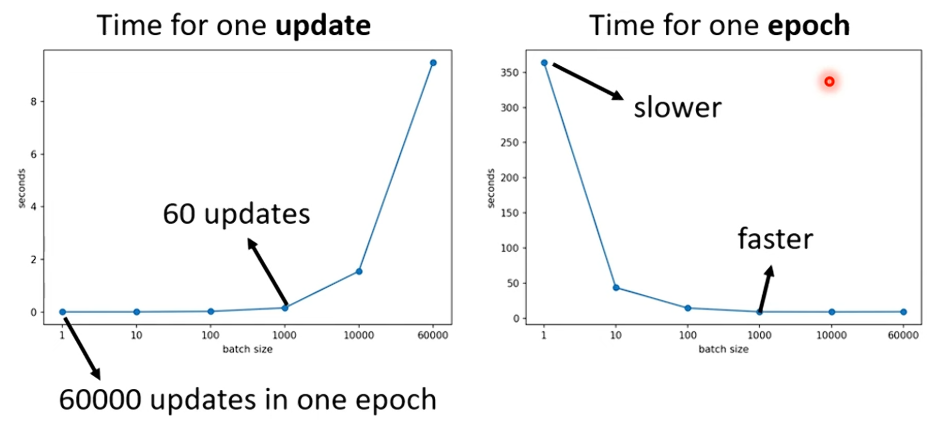
既然時間差不多,乍看之下 Batch Size 大一點比較好,但實際上小的 Batch Size 可能會有更好的訓練效果
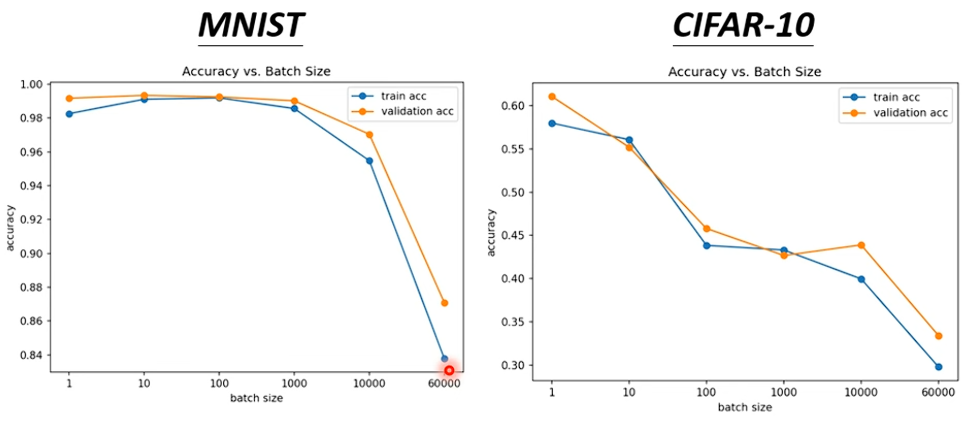
上圖可以看到小的 Batch Size Optimization 的效果會比較好
| Batch Size 小 | Batch Size 大 | |
|---|---|---|
| 每次 update (沒有平行運算) | 快 | 慢 |
| 每次 update (有平行運算) | 一樣 | 一樣 (在不是超大的情況下) |
| 每個 epoch | 慢 | 快 |
| Gradient 的穩定性 | 差 | 穩定 |
| Optimization 的效果 | 好 | 差 |
Momentum
一般的 Gradient Descent
- $\theta_{t+1} = \theta_t - \eta \cdot \nabla L(\theta_t)$
Momentum
$$
\begin{aligned}
\texttt{Start at} \quad \theta^0 \newline
\texttt{Movement} \quad m^0 &= 0 \newline
\texttt{Compute gradient} \quad g^0 \newline
\texttt{Movement} \quad m^1 &= \lambda \cdot m^0 - \eta \cdot g^0 \newline
\texttt{Move to} \quad \theta^1 &= \theta^0 + m^1 \newline
\texttt{Compute gradient} \quad g^1 \newline
\texttt{Movement} \quad m^2 &= \lambda \cdot m^1 - \eta \cdot g^1 \newline
\texttt{Move to} \quad \theta^2 &= \theta^1 + m^2 \newline
\end{aligned}
$$$m^i$ 就像是所有過去
Weighted Gradient的總和,$g^0, g^1, \cdots g^{i-1}$$$
\begin{aligned}
m^0 &= 0 \newline
m^1 &= \lambda \cdot m^0 - \eta \cdot g^0 \newline
&= -\eta \cdot g^0 \newline
m^2 &= \lambda \cdot m^1 - \eta \cdot g^1 \newline
&= \lambda \cdot (-\eta \cdot g^0) - \eta \cdot g^1
\end{aligned}
$$
Learning Rate
一般情況下的 Learning Rate 造成的問題
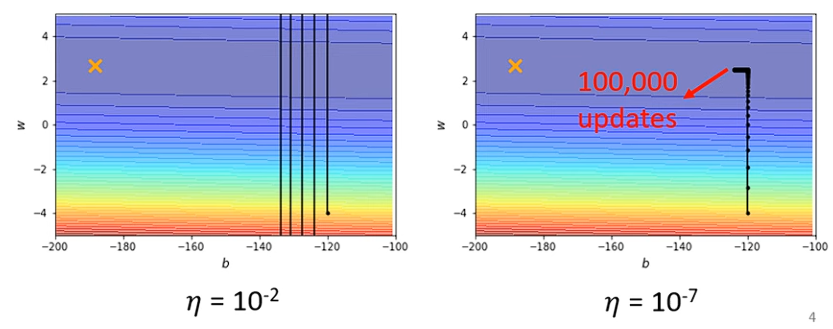
- 當
Learning Rate設定太大時,可能會造成Oscillation的問題,Loss 會一直在上下跳動,無法收斂 - 當
Learning Rate設定太小時,可能會造成Convergence的問題,Loss 會一直往下收斂,但是收斂的速度很慢。就像上圖一樣,當Gradient很大時,沒什麼問題,但是當Gradient很小時,就會卡住
上述例子中,每個參數的 Learning Rate 都是一樣的,但是實際上每個參數的 Gradient 都不一樣,應該要為每個參數的 Learning Rate 客製化。
AdaGrad (Adaptive Gradient)
用 Root Mean Square 來調整 Learning Rate
$$
\begin{aligned}
\theta^1_i \leftarrow \theta^0_i - \frac{\eta}{\sigma^0_i} \cdot g^0_i &\quad \sigma^0_i = \sqrt{(g^0_i)^2} = \lvert g^0_i \rvert \newline
\theta^2_i \leftarrow \theta^1_i - \frac{\eta}{\sigma^1_i} \cdot g^1_i &\quad \sigma^1_i = \sqrt{\frac{1}{2} \cdot [(g^0_i)^2 + (g^1_i)^2]} \newline
\theta^3_i \leftarrow \theta^2_i - \frac{\eta}{\sigma^2_i} \cdot g^2_i &\quad \sigma^2_i = \sqrt{\frac{1}{3} \cdot [(g^0_i)^2 + (g^1_i)^2 + (g^2_i)^2]} \newline
\vdots \newline
\theta^{t+1}_i \leftarrow \theta^t_i - \frac{\eta}{\sigma^t_i} \cdot g^t_i &\quad \sigma^t_i = \sqrt{\frac{1}{t} \cdot \sum^t_k (g^k_i)^2}
\end{aligned}
$$
從公式可以觀察到,當坡度小的時候,Gradient 會比較小,算出來的 $\sigma$ 也會比較小,所以 Learning Rate 會比較大,反之亦然。
然而,當 t 很大時,當前的 Gradient 可能會被過去累積的 Gradient 稀釋掉,導致收斂速度變慢,不能實時考慮梯度的變化情況。
RMSprop
RMSprop 增加了 Decay Rate $\alpha$,可以控制 當前的 Gradient 和 過去累積的 Gradient 的重要程度
$$
\begin{aligned}
\theta^1_i \leftarrow \theta^0_i - \frac{\eta}{\sigma^0_i} \cdot g^0_i &\quad \sigma^0_i = \sqrt{(g^0_i)^2} = \lvert g^0_i \rvert \newline
\theta^2_i \leftarrow \theta^1_i - \frac{\eta}{\sigma^1_i} \cdot g^1_i &\quad \sigma^1_i = \sqrt{\alpha \cdot (\sigma^0_i)^2 + (1 - \alpha) \cdot (g^1_i)^2} \newline
\theta^3_i \leftarrow \theta^2_i - \frac{\eta}{\sigma^2_i} \cdot g^2_i &\quad \sigma^2_i = \sqrt{\alpha \cdot (\sigma^1_i)^2 + (1 - \alpha) \cdot (g^2_i)^2} \newline
\vdots \newline
\theta^{t+1}_i \leftarrow \theta^t_i - \frac{\eta}{\sigma^t_i} \cdot g^t_i &\quad \sigma^t_i = \sqrt{\alpha \cdot (\sigma^{t-1}_i)^2 + (1 - \alpha) \cdot (g^t_i)^2}
\end{aligned}
$$
- $\alpha$ 為
Decay Rate,通常設為 0.9
最常用的 Optimizer 是 Adam,他就是 RMSprop 和 Momentum 的結合
Learning Rate Scheduling
Learning Rate Decay
隨著參數的更新,
Learning Rate逐漸變小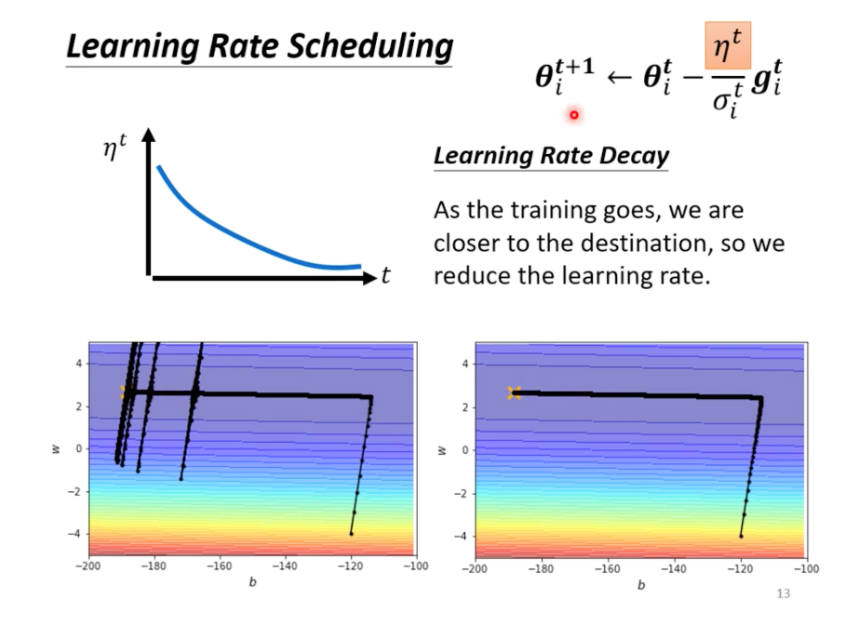
左邊是
AdaGrad,當縱軸的Gradient一直都是很小的值時,會導致 $\sigma$ 變得很小,造成Learning Rate放的很大,因此會飛出去。右邊是加上Learning Rate Decay。Warm Up
在一開始的時候,
Learning Rate會比較小,然後逐漸變大,最後再變小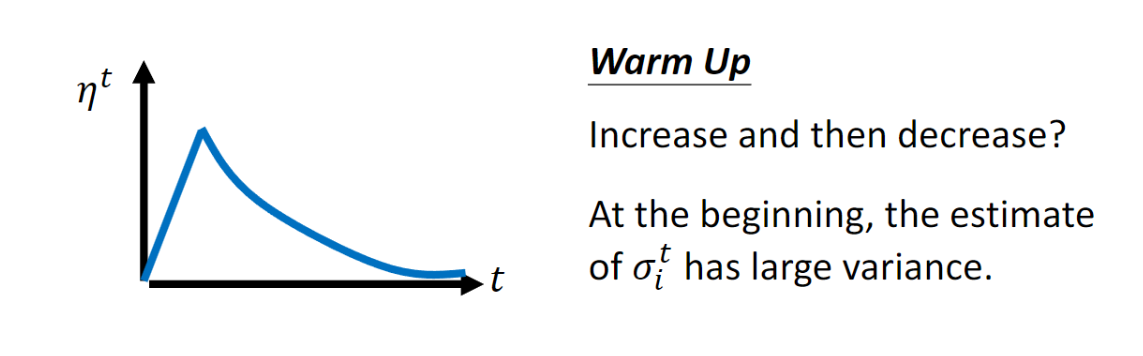
Loss Function
Loss Function 也會影響到 Optimization 的效果,這邊以分類問題為例。
Classification
在 Classification 的問題中,通常會用 one-hot encoding 來表示 label,例如:
$$
\begin{aligned}
\hat{y} &= [1, 0, 0] \newline
\hat{y} &= [0, 1, 0] \newline
\hat{y} &= [0, 0, 1] \newline
\end{aligned}
$$
最後在 Output 的時候,通常會把輸出 y 通過 Softmax 函數,再讓他和 one-hot encoding 的 label 做比較,計算出 Loss
$$
\begin{aligned}
\text{Softmax}(z)_i &= \frac{e^{z_i}}{\sum^n_j e^{z_j}} \newline
\hat{y} \leftrightarrow y^\prime &= \text{Softmax}(y) \newline
\end{aligned}
$$
- 這裡的
y稱為logit Softmax可以把Output變成Probability,讓Output的值在 0 到 1 之間,並且總和為 1- 當只有兩個 Class 時,
Softmax和Sigmoid的作用是一樣的
Loss Function of Classification
可以直接用 MSE,但是 Cross-entropy 通常表現的比較好
Cross-entropy
$$L = -\sum_{i=1}^{n} \hat{y_i} \cdot \ln(\hat{y}_i)$$- Minimize
Cross-entropy就是最大化Likelihood
- Minimize
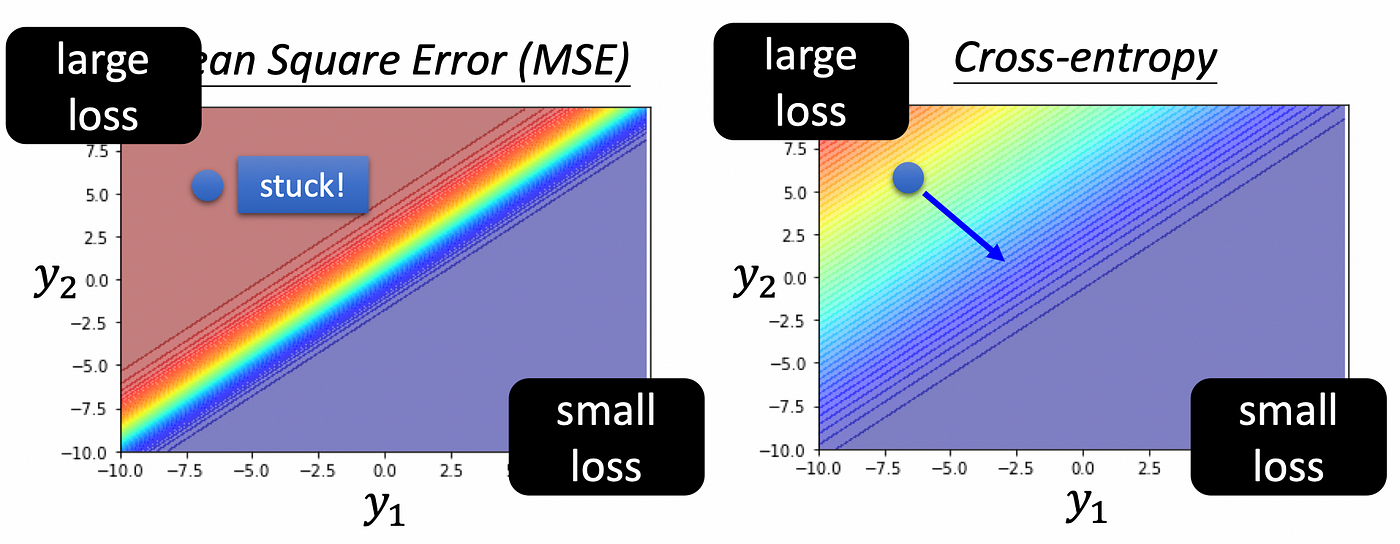
上圖可以看到,在 Classfication 問題用 MSE 可能會 train 不起來
Batch Normalization
有時候在 Error Surface 中,不同維度的輸入值可能差很多,導致 Error Surface 很扭曲,斜率、坡度都不同
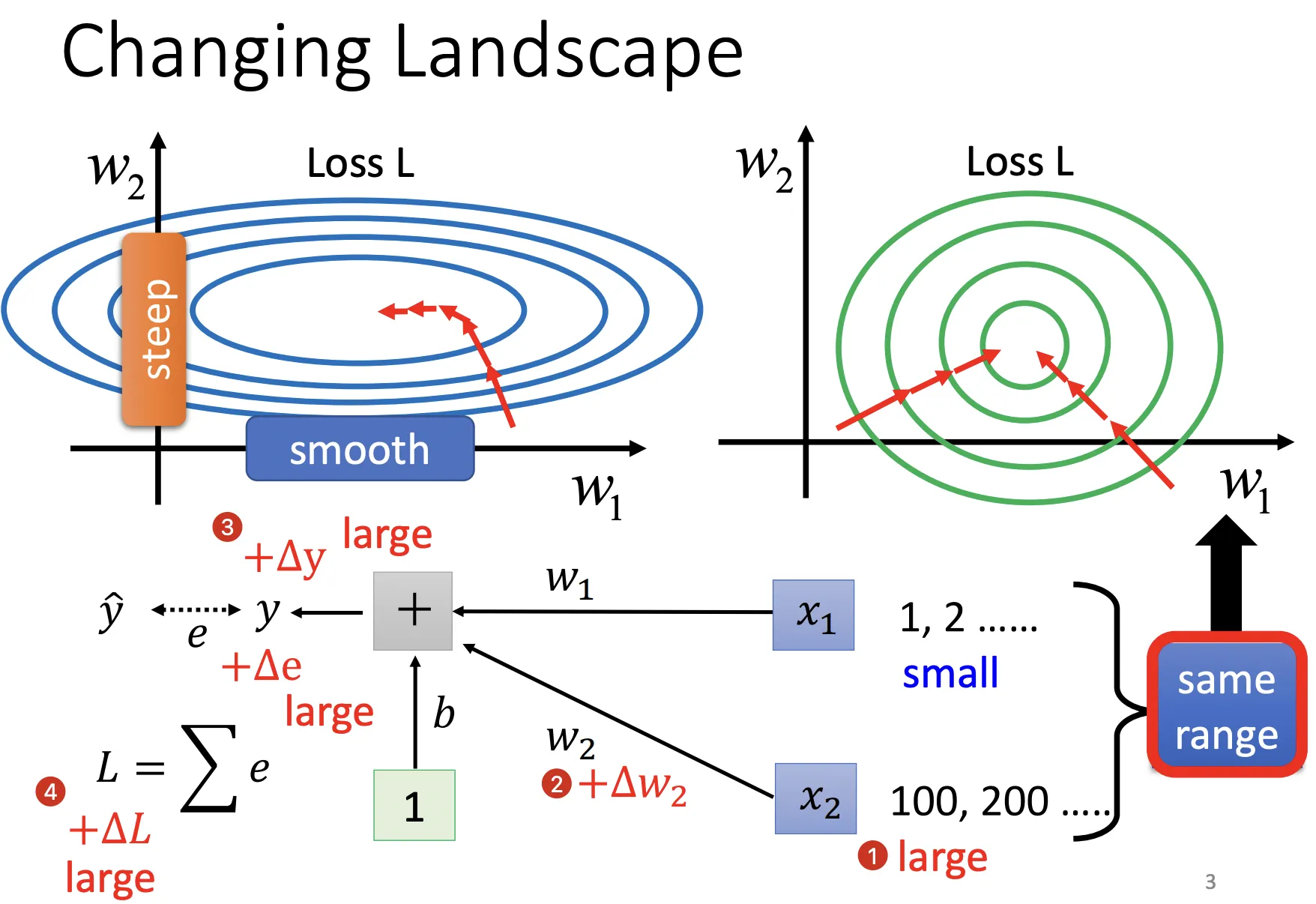
對於一個 Batch 的資料,對每一個 Feature 做 Feature Normalization,讓他的 Mean 為 0,Variance 為 1,稱為 Batch Normalization
$$
\begin{aligned}
\mu &= \frac{1}{m} \sum_{i=1}^{m} x_i \newline
\sigma^2 &= \frac{1}{m} \sum_{i=1}^{m} (x_i - \mu)^2 \newline
\hat{x}_i &= \frac{x_i - \mu}{\sqrt{\sigma^2 + \epsilon}} \newline
\end{aligned}
$$
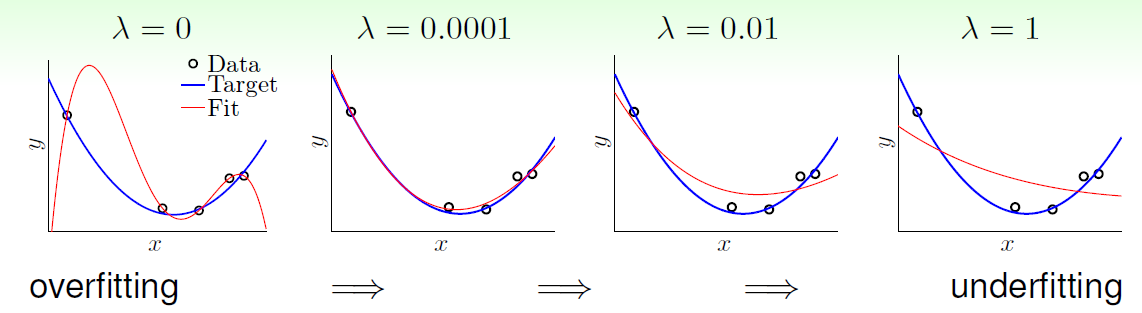
Regularization
最常使用 L1 和 L2 Regularization,在 Loss Function 中加上 Regularization Term,讓 Model 不要太複雜
公式來源可以參考 Lagrange Multiplier。
L1 Regularization
$$
Loss_Fn = original_Loss_Fn + \lambda \cdot \sum_{i=1}^{n} \lvert w_i \rvert
$$
L2 Regularization
$$
Loss_Fn = original_Loss_Fn + \lambda \cdot \sum_{i=1}^{n} w_i^2
$$